What is a Tool Presetter?

Source: ZOLLER venturion450
A **tool presetter** is an important tool that contributes to the **efficiency** and **quality improvement** of the machining process.
It can accurately measure the dimensions and position of the tools used for machining.
Since tool measurement is performed **outside the machine tool**, the machine tool downtime during setup can be reduced.
Furthermore, tool-related data is stored in a database, allowing for reference to necessary information at any time.
By setting accurate dimensions and positions, the consistency of the product shape and finish is ensured, and the number of defective products can be reduced.
This is expected to lead to **improved production quality** and **reduced defects**.
Tool Presetter Automation System
Tool Transfer by Robot
A 6-axis robot transfers tools
to automate tool measurement
Design considering human-collaborative work
Ceiling-mount layout
secures human workspace
Control by dedicated application
Batch control of
robot and tool presetter
Utilizing Yamamoto Kinzoku’s robot SIer technology, we automate ZOLLER’s tool presetter “venturion450”.
The system automatically picks up the tool, installs it into the main unit, measures it, and then transports the tool back to its original position.
The measured tool diameter and tool length of various tools are saved and sent to the machine tool via the application.
This offers benefits such as improved setup efficiency, increased productivity, and enhanced quality.

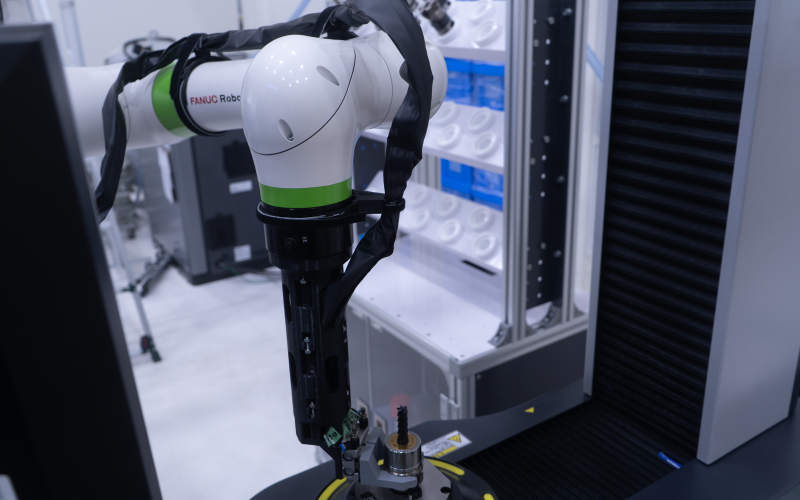
Robot Main Unit
Uses FANUC Collaborative Robot CRX10iA-L (10kg payload)
The ceiling-mount specification allows human access to the working area
(Height from the floor when the robot arm is folded… approx. 2m)

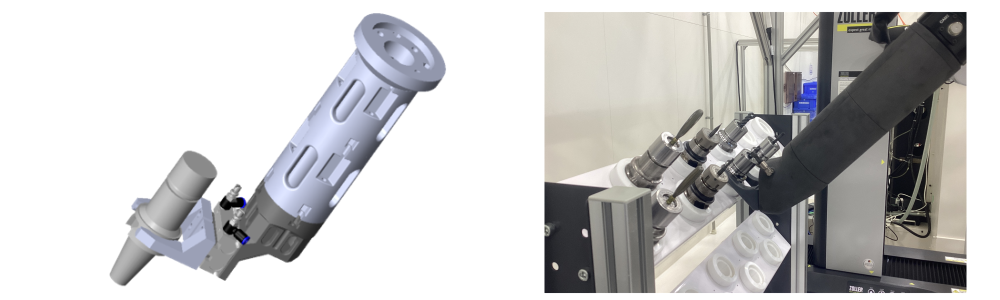
Robot Hand / Arm
The robot hand and robot arm are manufactured in-house
Robot arm components are designed for both strength and light weight, and manufactured using a 3D printer
The gripper part of the hand is also manufactured with a 3D printer so that it can handle various tools simply by replacing the gripper
Tool Wagon / Positioning Rotary Table
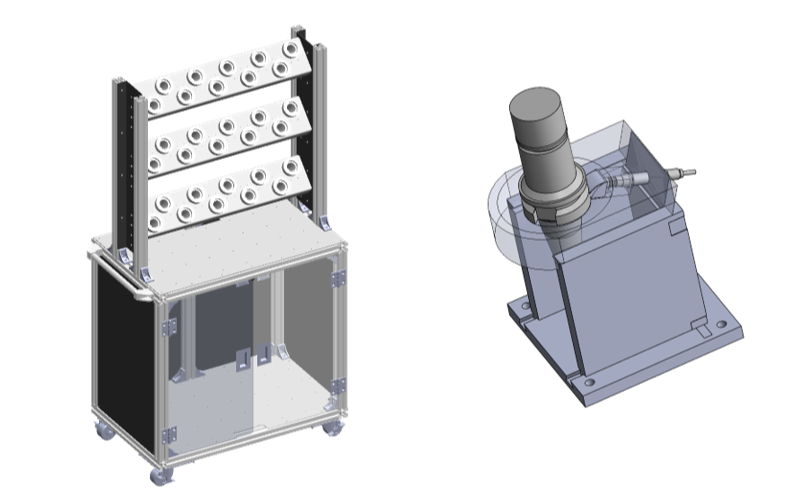
Uses an in-house manufactured tool wagon
The top half is a tool shelf, and the bottom half has swing doors
It adopts a caster-mobile design, anticipating future AGV integration
Can store a maximum of 10 tools × 3 tiers = 30 tools (BT30 holders)
The positioning rotary table identifies the position of the tool’s drive key,
allowing it to be set into the presetter in a consistent orientation
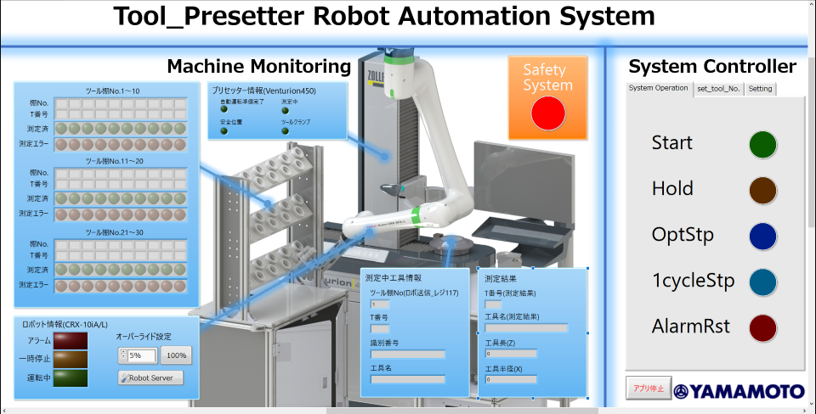
Control System (PC Application)
Uses an in-house developed control application
It can connect the robot and the tool presetter to perform motion control
It can also connect to a machine tool and automatically generate an NC program that reflects the measured values (tool diameter/tool length)
By transferring the NC program to the machine tool and executing it on the machine side, the tool measurement values are input
venturion450 (Tool Presetter)
The tool presetter used is ZOLLER venturion450
Capable of measurement in 1 μm increments, with a repeatability of ±2 μm
It can perform inspections for wear and chipping, and measure the tool diameter/tool length of various tools (standard function)
Fully automatic measurement is possible through the drive of the CNC-controlled axes (option)
Core height measurement of turning tools is possible (option)
(The above specifications are extracted from the ZOLLER venturion catalog)
Communication with the system control software is performed via TCP/IP communication, enabling the execution of safety position movement, tool clamp/unclamp, and measurement start commands via the control software on the PC from the robot

Introduction Video
Flow from Order to Request
- We accept consultations by phone and email
- First, please feel free to contact us by phone or email.
We will respond quickly.
- We will conduct a hearing and ask about your requests
- We will coordinate your requests through a visit or a web conferencing system meeting.
We will submit a quotation based on the requested specifications.
- Our representative, knowledgeable in robots, will visit upon request
- Upon request, our representative will visit your location.
(However, visits may not be possible depending on the region, etc.)
We will propose the best solution for your product.






- TOP
- Business Introduction
- Tool Presetter Automation System