Achieving both reduced operator burden and efficiency! NC Lathe Automation Case using a Collaborative Robot
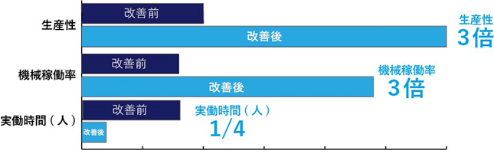
Introduction Effect
- Before
- Picking material from the workpiece shelf
Cleaning with air blow, then chucking to the lathe
Returning to the workpiece shelf after machining is complete
- After
- Setting material on the workpiece shelf
Features
・Flexible switching between human work and robot operation
→Free space in front of the full-surface door
・One robot hand supports two processes
→Hand shape devised
Target Machine
Introduced Machine: NC Lathe Takisawa Machine Tool: TCN2100L6 (Front automatic door)
Introduced Robot: 10kg payload Collaborative Robot