作業者の負担軽減と効率化を両立!協働ロボットによるNC旋盤自動化事例
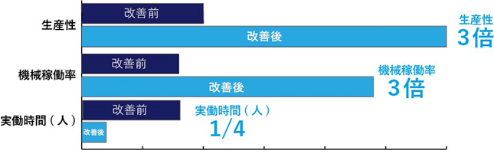
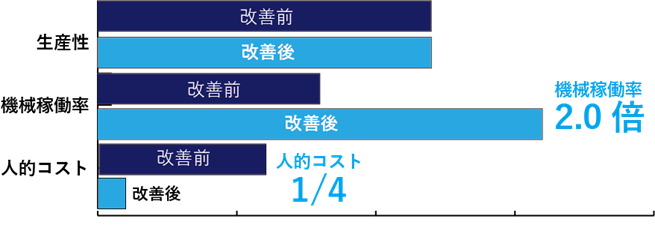
導入効果
- Before
- ワーク棚から材料をピッキング
エアブローで清掃後、旋盤にチャッキング
加工完了後、ワーク棚に戻す
- After
- ワーク棚に材料をセッティング
特徴
・人の作業とロボット運転を柔軟に切り替え可能
→全面ドアの前をフリースペース化
・1つのロボットハンドで2工程に対応
→ハンド形状を工夫
対象機械
導入機械:NC旋盤 滝澤鉄工所:TCN2100L6 (正面自動ドア)
導入ロボ:10kg可搬 協働ロボット
Case
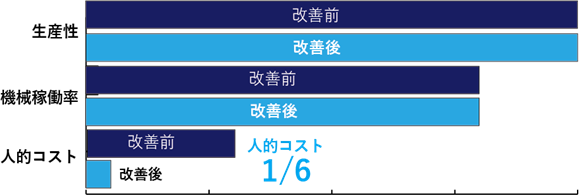
・人の作業とロボット運転を柔軟に切り替え可能
→全面ドアの前をフリースペース化
・1つのロボットハンドで2工程に対応
→ハンド形状を工夫
導入機械:NC旋盤 滝澤鉄工所:TCN2100L6 (正面自動ドア)
導入ロボ:10kg可搬 協働ロボット
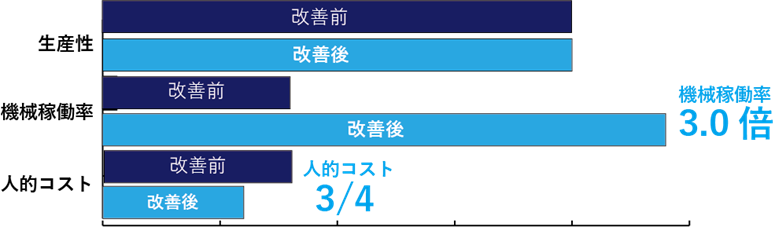
・人の作業とロボット運転を柔軟に切り替え可能
→全面ドアの前をフリースペース化
・1つのロボットハンドで2工程に対応
→ハンド形状を工夫
・走行軸追加によるロボットの効率活用
→ 2台の旋盤を1台のロボットで取り回し
導入機械:NC旋盤 滝澤鉄工所:TCN2100L3 2台 (正面自動ドア)
導入ロボ:12kg可搬産業用ロボット +1軸走行台車
・ワークの腐食対策
→小型超音波洗浄工程の追加
・正確な把持の実現
→画像処理によるワーク位置の認識
寸法計測の自動化
→計測値を随時記録し 工作機械へフィードバック
・補正値の自動入力
→計測値から補正値を自動で入力
導入機械:NC旋盤 ツガミ:M08J-Ⅱ (バー仕様)
導入ロボ:10kg可搬 協働ロボット

・人の作業に干渉しない
→省スペースでの導入が可能な設計
・寸法変化の推移の見える化
→ワークの外径計測、グラフ描画の実施
・補正値を自動でフィードバックし安定生産を実施
→測定値から加工機へ補正値をフィードバック
導入機械:NC旋盤 高松機械:XL-100 (ローダー仕様)
導入ロボ:0.75kg可搬 ミニロボット
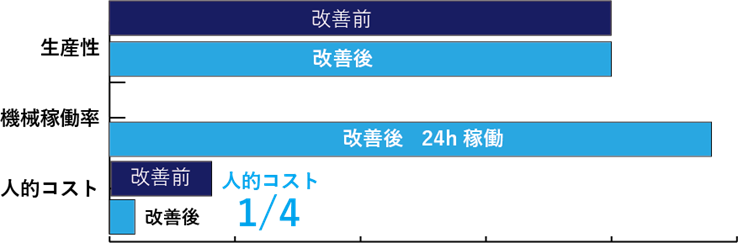
・人の作業に干渉しない
→全面ドアの前はフリースペース
・14時間以上の連続運転が可能
→最大1000個以上のワークを自動供給・回収
・折損検知の導入
→Gコードで動作するためユーザーでも活用しやすい折損検知を取付
・LANケーブル1本で装置連動
→機械側は改造レス
導入機械:NC旋盤 高松機械:XC-100 (ローダー仕様)
導入ロボ:直動ロボット7軸
・網かごからのバラ積みピッキング
→3Dビジョンの活用
・グリス供給作業の自動化
導入ロボ:10kg可搬 協働ロボット

・多品種、複雑形状の磨きに対応
→ロボットでポリッシャー作業を実施
・3D形状でも対応可能
→CAMを用いた磨きパスの作成
・ロボットの内部データから、加工の良否を判断可能
→複数のロボット内部パラメータのモニタリング
導入ロボ:14kg可搬 協働ロボット
・両面計測対応ハンド形状
→ハンド形状を工夫し、プレート状製品の計測を可能に
・計測データの個体管理、識別
→ロボットのカメラによる個体識別認識
導入ロボ:4kg可搬 協働ロボット(2Dカメラ付き)