ツールプリセッターとは?

ツールプリセッターは加工プロセスの効率化や品質向上に貢献する重要なツールです。
加工に使用するツールの寸法や位置を正確に測定することができます。
工作機械の外部でツールの測定を行うため、段取り時の工作機械停止時間を短縮可能です。
また、ツールに関するデータをデータベースに保存し、必要な情報をいつでも参照できます。
正確な寸法や位置を設定することで、製品の形状や仕上がりの一貫性を確保し、不良品の数を減らせます。
これにより、生産品質の向上や不良品の減少が期待できます。
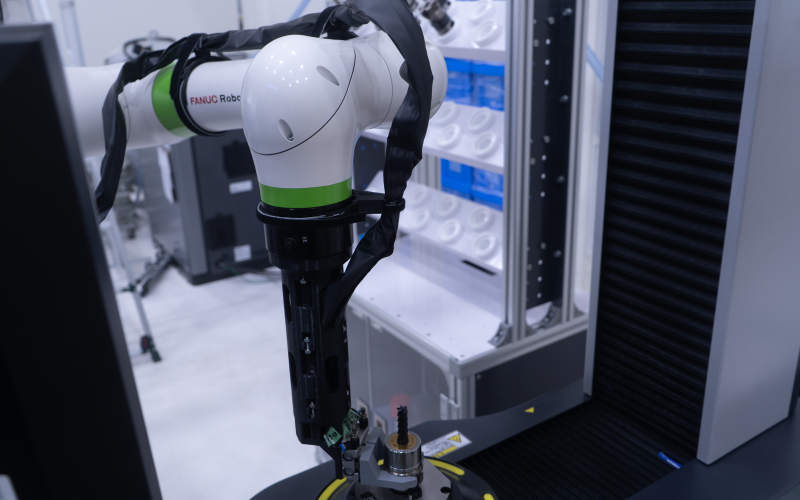
ツールプリセッター自動化システム
ロボットによるツール搬送
6軸ロボットにてツールを搬送し
工具測定を自動化
人協調作業に配慮した設計
天吊りレイアウトで
人の作業スペースを確保
専用アプリによる制御
ロボットとツールプリセッター
を一括制御
山本金属のロボットSIer技術を駆使しZOLLER社製のツールプリセッター「venturion450」の自動化を行います。
ツールをピッキング、本体へ設置・測定後、その後ツールをもとの位置へ自動的に搬送します。
測定された各種工具の工具径、工具長は保存されアプリケーションを通して工作機械へ送信されます。
段取りの効率化や生産性向上、品質向上などのメリットがございます。

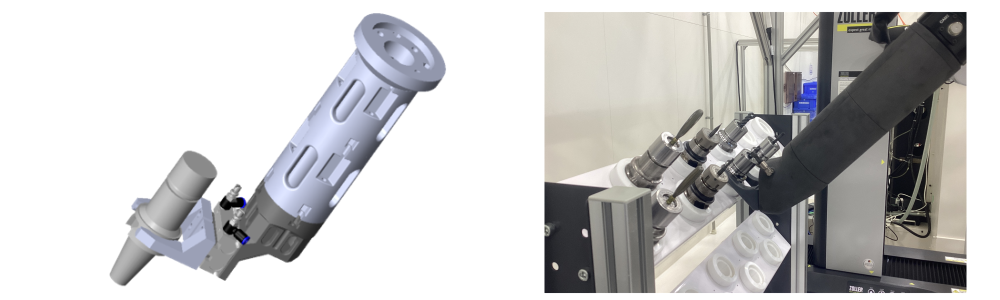
ロボット本体

ロボットハンド・アーム
ロボットハンド・ロボットアームは自社で製作
ロボットアーム部品は強度と軽量化を両立するために設計3Dプリンターにて製作
ハンド爪部分についても搬送ツールを爪部分の取り換えのみで対応可能にするため、3Dプリンターで製作
ツールワゴン・位置決め回転台
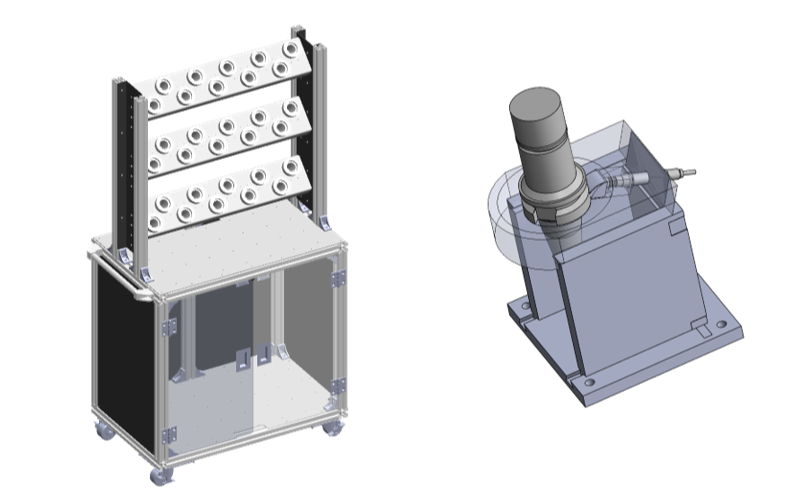
自社製作のツールワゴンを使用
上半分はツール棚、下半分は開き扉仕様です
将来的にAGV化も想定し、キャスター移動式を採用しています
最大で10本×3段=30本のツールの格納が可能(BT30のホルダ)
位置決め回転台によりツールのドライブキーの位置を判別し、
一定の向きでプリセッターへ設置することが可能
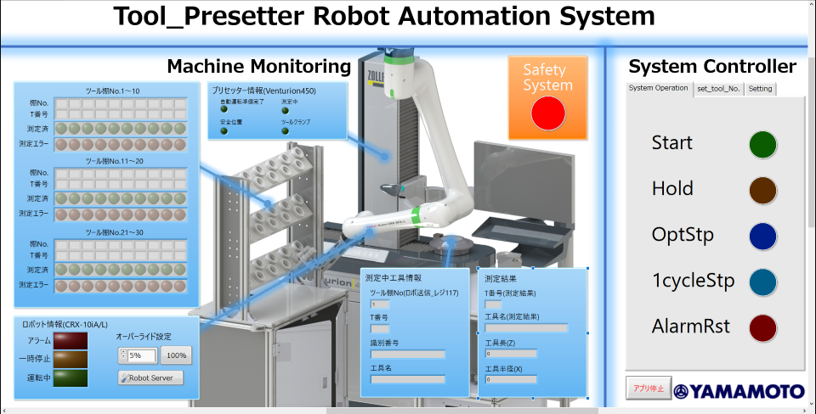
制御システム(PCアプリケーション)
自社開発の制御アプリケーションを使用
ロボット、ツールプリセッターをつなぎ、動作制御を実施することが可能です
工作機械とも接続可能で測定値(工具径・工具長)を反映したNCプログラムを自動生成できます
工作機械に転送し機械側でNCプログラムを実行することで、工具測定値が入力される仕様になります
venturion450(ツールプリセッター)
ツールプリセッターはZOLLER社製 venturion450を使用しています
1μm単位での測定が可能、繰り返し精度±2μm
摩耗やチッピングなどの検査、および各種工具の工具径・工具長の測定が可能です(標準機能)
CNC制御による駆動軸の駆動により、全自動計測が可能です(オプション)
ターニングツールの芯高測定が可能(オプション)
(上記仕様はZOLLER社venturionカタログより抜粋)
システム制御ソフトとの通信方法はTCP/IP通信にて実施ロボットからPC上の制御ソフトを介して、
安全位置移動、ツールクランプ・アンクランプ、測定開始命令を実行可能になります

紹介動画
ご注文・ご依頼までの流れ
- お電話・メールで、ご相談を受け付けます
- まずは、お電話またはメールでお気軽にお問い合わせください。
スピーディーにご対応させていただきます。
- ヒアリングし、お客様のご要望をお伺いします
- 御訪問やWEB会議システムでのお打ち合わせを通して、要望などを摺合せさせて頂きます。
試験仕様に基づき、御見積書をご提出します。
- ご希望に応じて、ロボットに熟知した担当者が訪問いたします
- ご希望により、当社の担当者がお客様のもとへお伺いします。
(但し、地域等により訪問できない場合もあります)
貴社にとってベストな製品につながるご提案をさせていただきます。